OpenDroneMap 2.1.0 — the biggest update yet?

That title might be clickbait, but it is meant as a nod to the feature parity that has been long in the making between OpenDroneMap relative to more mature projects, whether those more mature projects are the venerable, free and open source MICMAC or its derivatives in the form of the various closed-source offerings in the photogrammetry industry.
So, is 2.1.0 the biggest update yet? I would say it’s the update that suddenly brings us to feature parity in almost all categories. And it all starts with improved structure from motion (updates to OpenSfM), continues through improved point clouds (replacement of MVE with OpenMVS), and finishes with improved (waves at) everything.
Speed and Structure from Motion
With the update to the latest OpenSfM, we see a 25-45% speed up in portions of OpenSfM processing. This is very exciting and due to some low level changes, specifically: “reprojection of derivatives … are now computed analytically instead of autodiff-ed”. There are other, subtler improvements to OpenSfM, but that is the feature most noticable to end users.
Speed and dense point cloud production
The MVE library has been swapped out for OpenMVS. On the surface, this slows things down: for the same resolution depthmaps, OpenMVS runs at half the speed of MVE. But, the speed comparison is deceptive: we see such a high quality improvement from changing libraries, we can easily run at lower depthmap values and get better results resulting in an effective speed increase, with improved quality.
Quality improvements
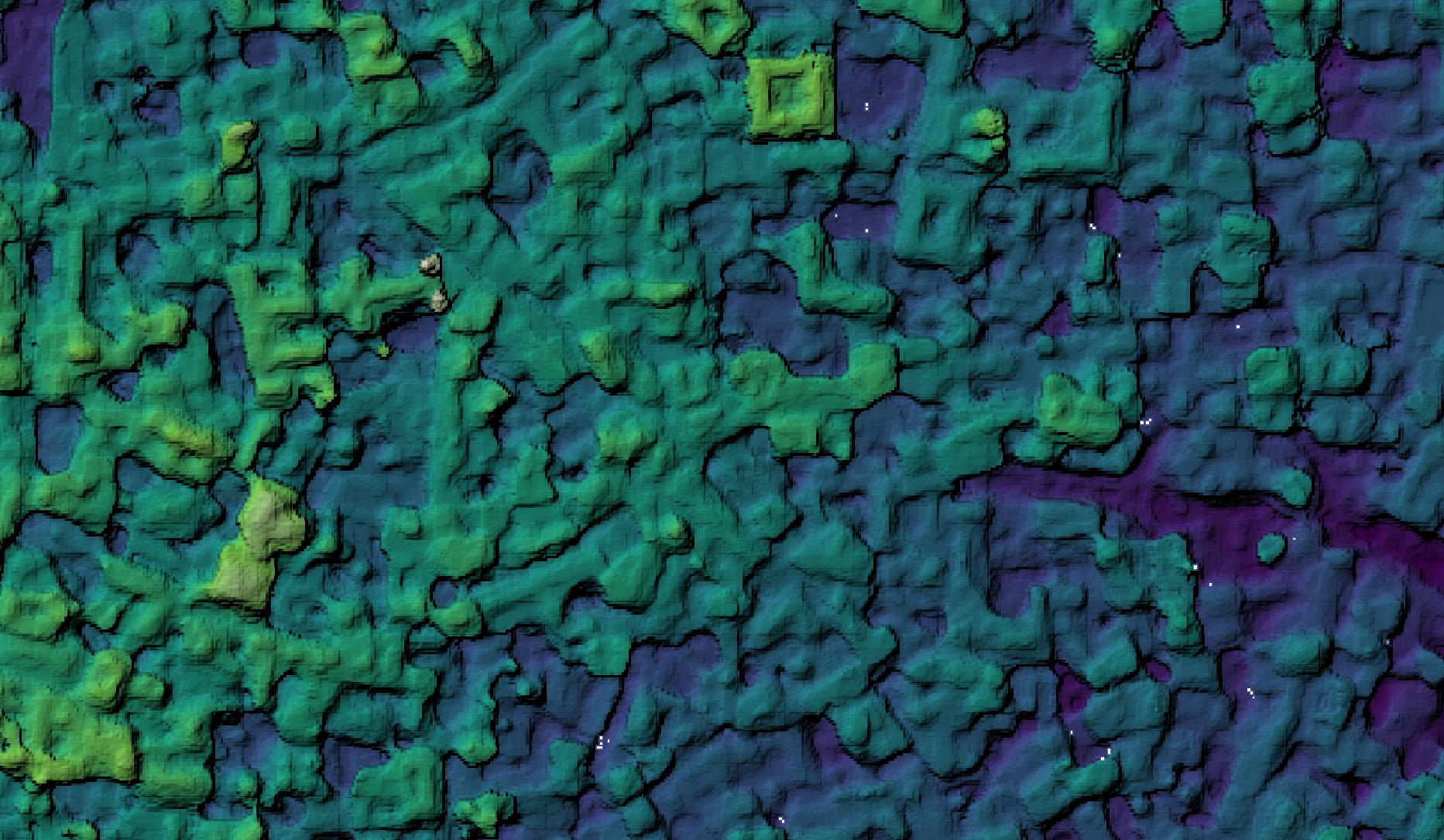
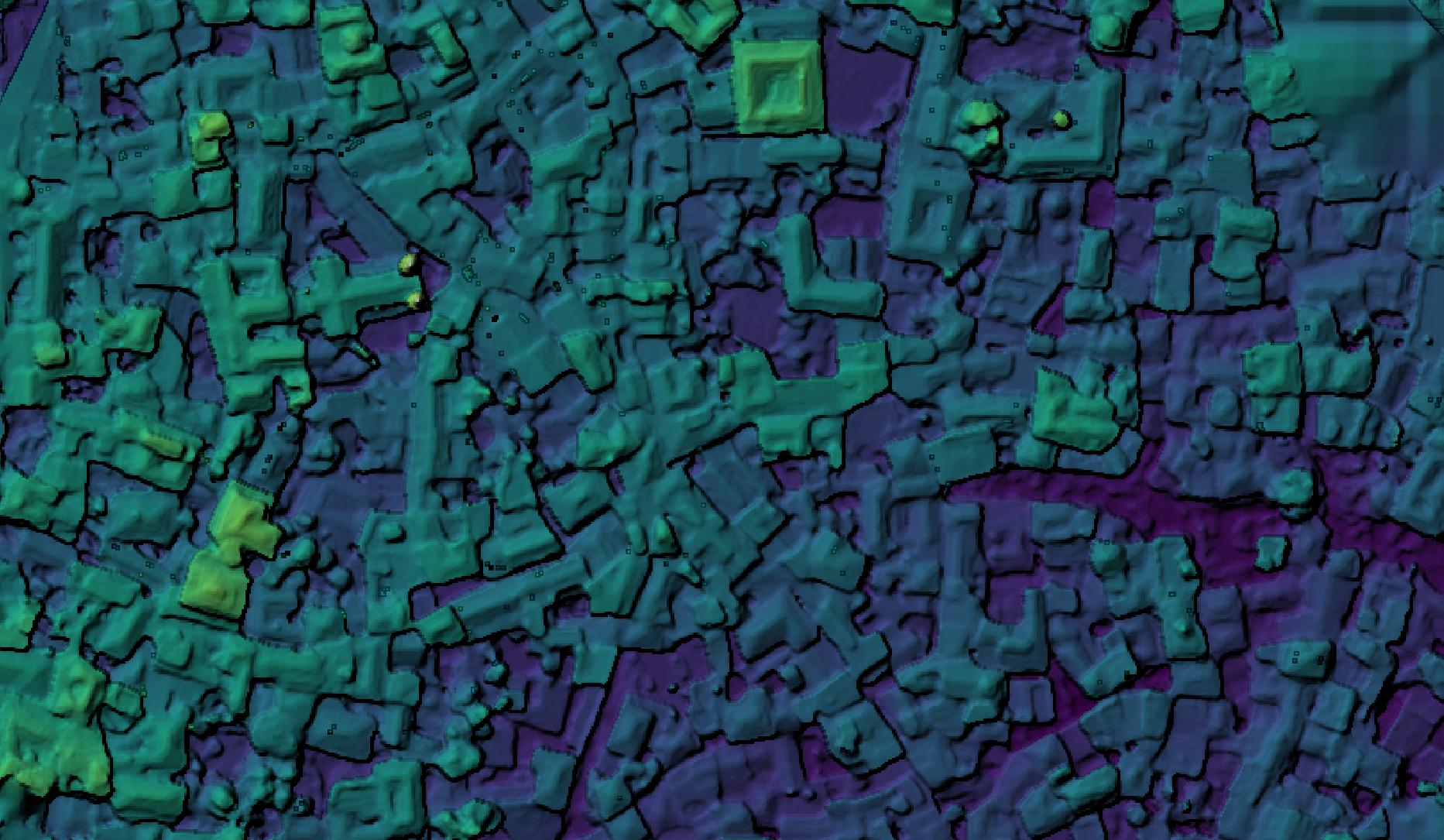
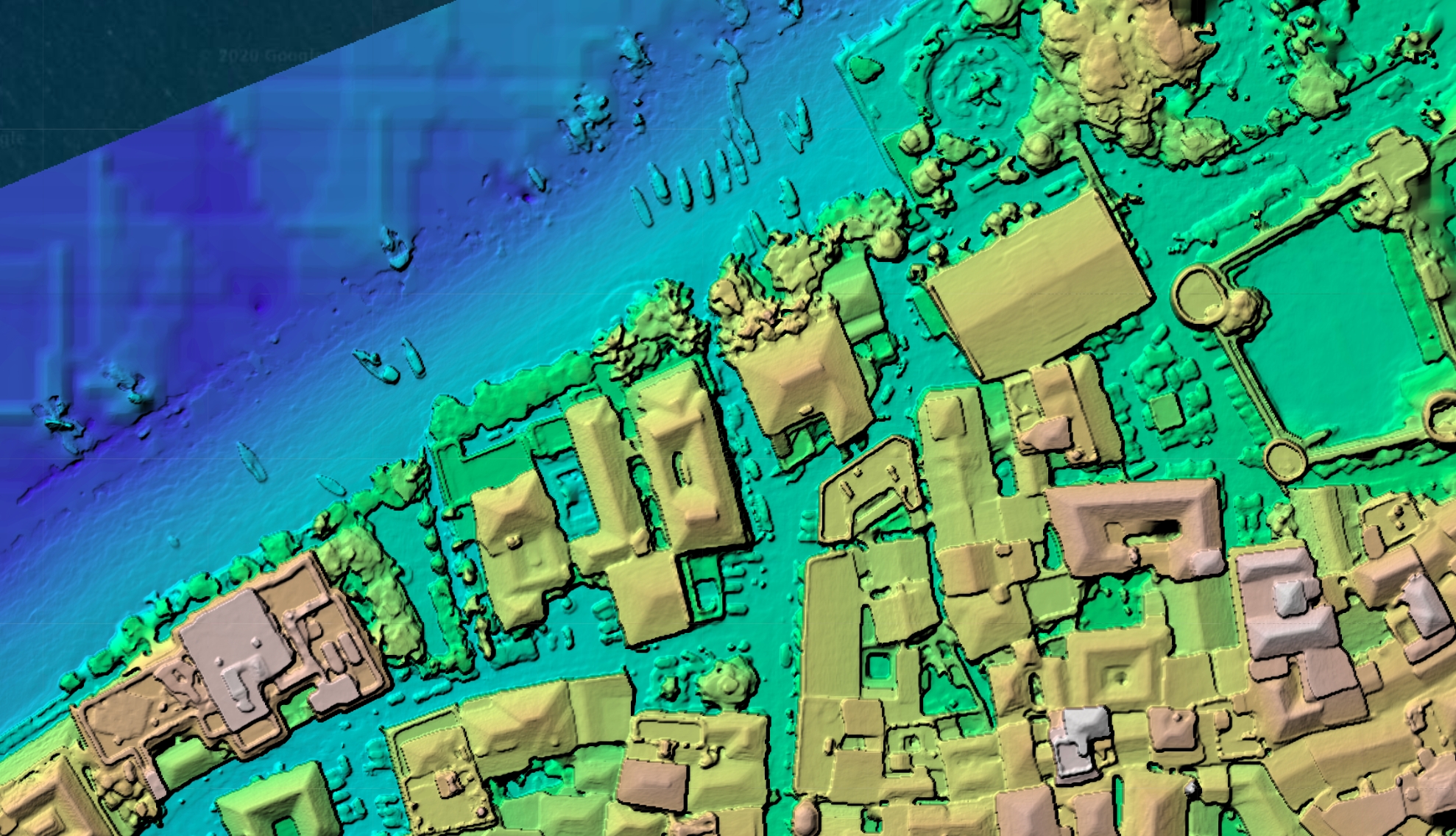
The biggest noticeable change will be in the quality of point cloud outputs and all subsequent products, from orthophotos to digital surface models, and digital terrain models.

Because the point clouds effect the quality throughout the rest of the toolchain, we see substantially improved digital surface models:
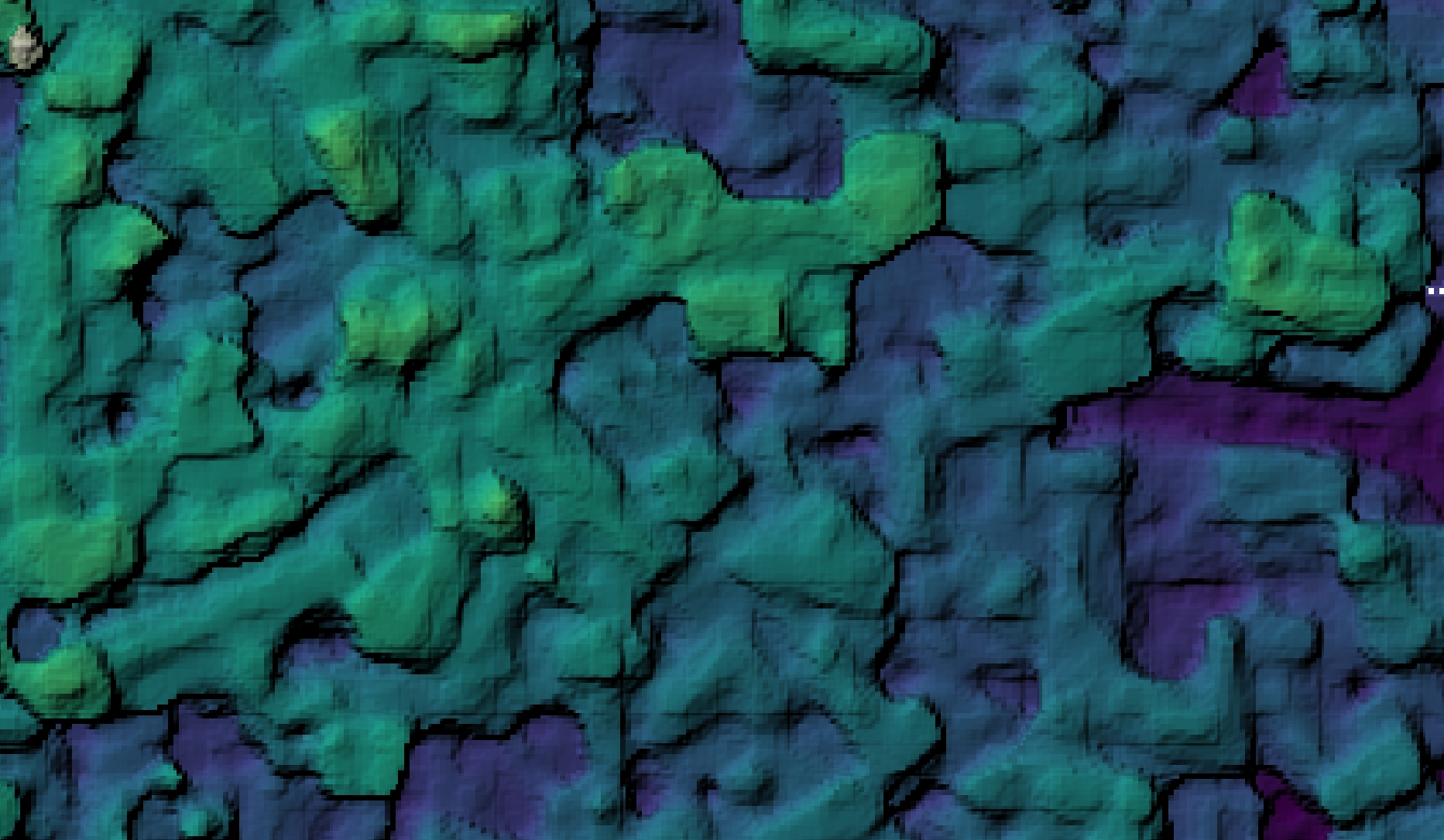
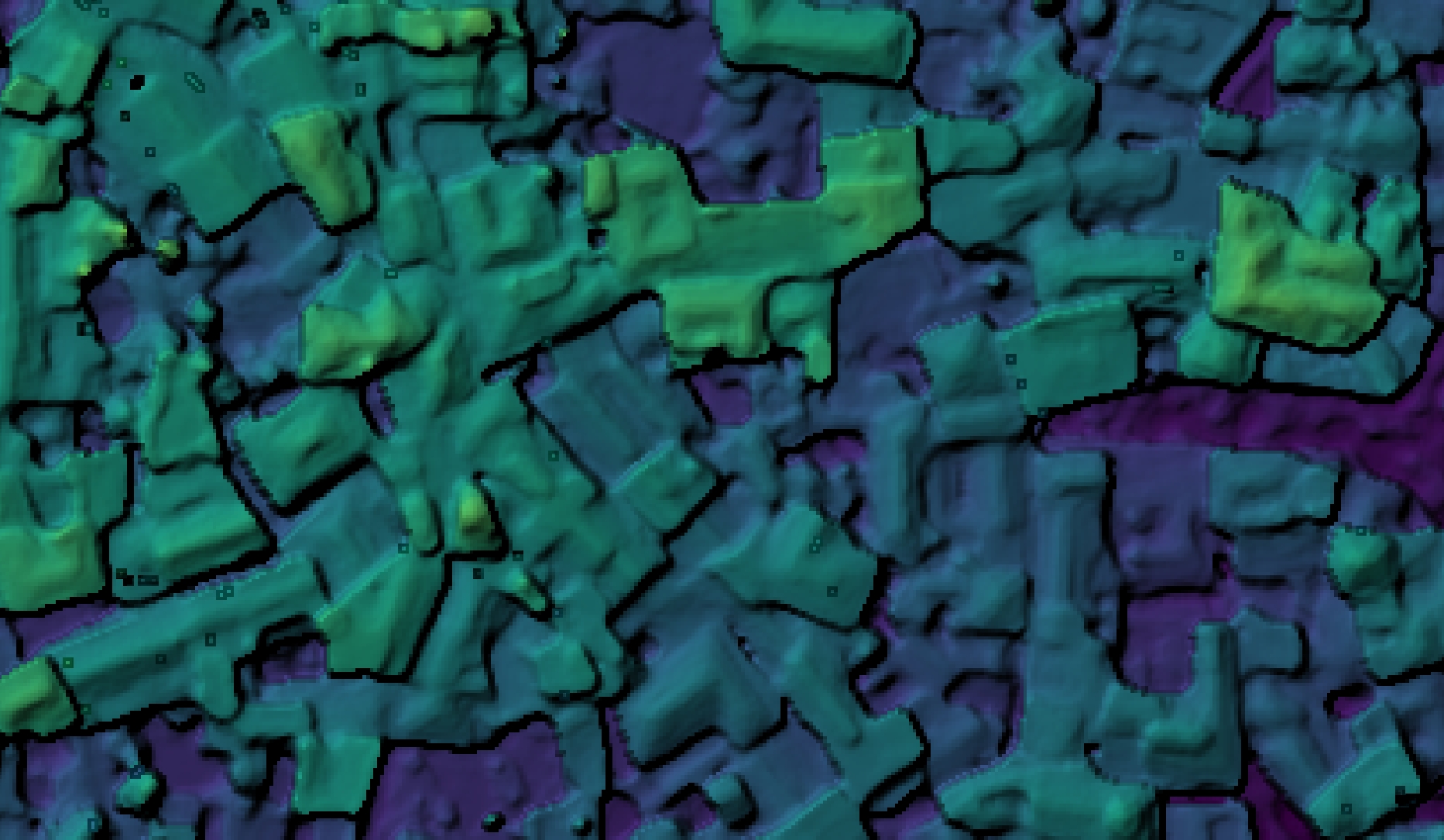
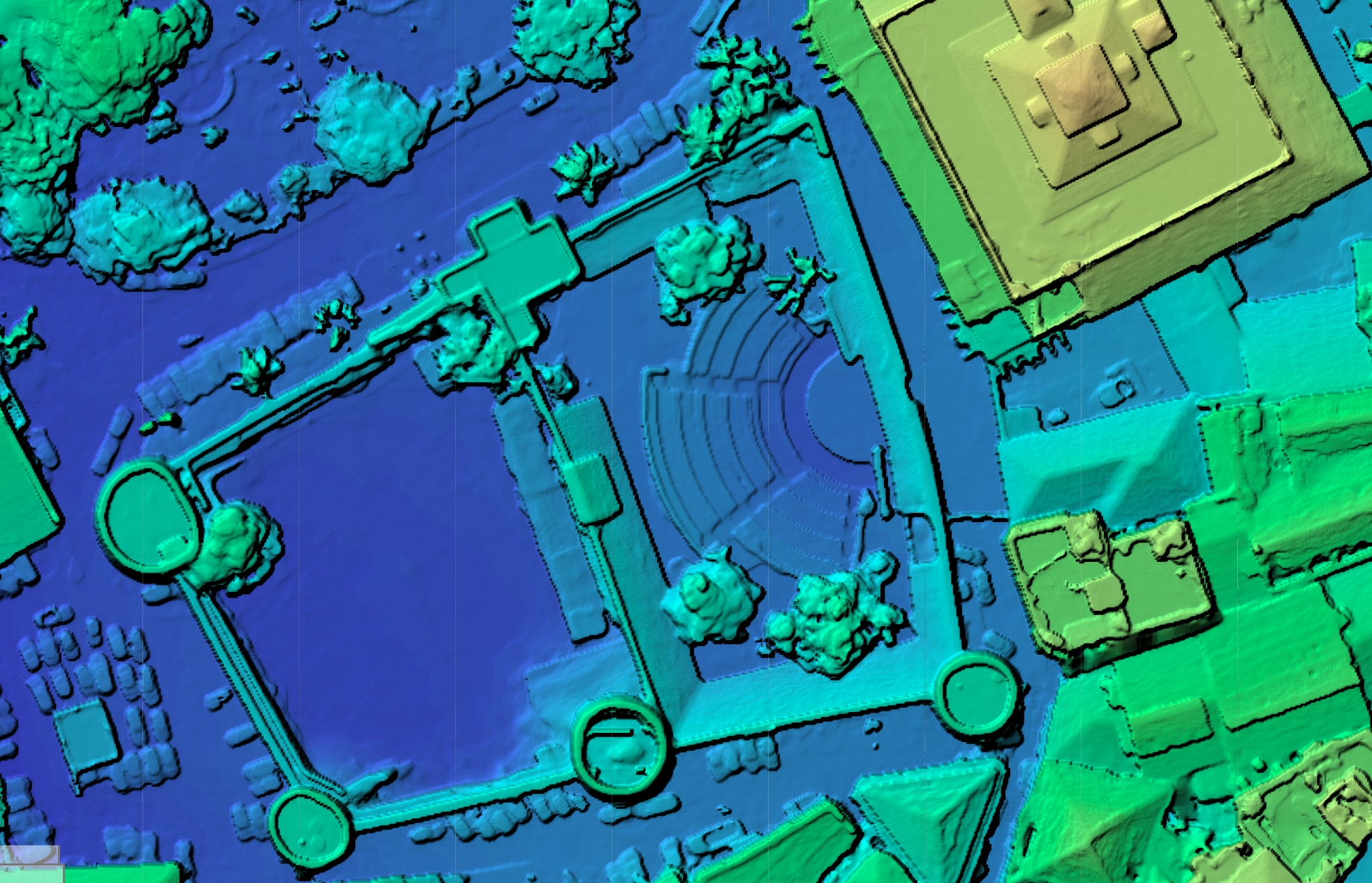
Higher fidelity in point clouds results in better automated point cloud filtering:
And so on. Updates are committed and out in the wild. It’s time to update your OpenDroneMap instance and have fun with the improved quality and speed.
How much better?
So, how much better are these point clouds? How do they compare to the rest of the industry? You don’t have to take our word for it, check out the leaderboard at tanksandtemples.org.
You’ll find the OpenMVS leads amongst FOSS solutions. Look closely enough, you might find a closed source drone image processing favorite trailing OpenMVS by a large margin… .
(Footnote, these leaderboard comparisons don’t compare the combination of OpenSfM and OpenMVS, but are a decent proxy for a full comparison).
Is this really bigger than that closed-source product?
Probably. OpenDroneMap has for more than a year had the benefit of being one of the most scalable solutions, both from a technology perspective with an industry leading process for splitting and recombining datasets, but from the licensing “technology” with licensing that costs the same amount regardless of how many machines it is deployed to.
In 2019, we saw OpenDroneMap process datasets in excess of 30,000 images into a spatially harmonized dataset, something at the edge of the possible at the time. In 2020, we have seen 90,000 image datasets successfully processed in the same way. It might be the largest spatially harmonized dataset yet processed, though we are happy to hear of similar projects in case we are wrong!
Is this really better than that closed-source product?
The recent (2 day old) quality improvements don’t just benefit from OpenMVS. OpenSfM does an industry leading job of balancing the accuracy of GPS information with the quality of camera calibration. This means that for massive datasets where you need good 3D data, OpenDroneMap can deliver a good product for things like flood modeling, terrain change detection, and other data needs that are sensitive to three-dimensional fidelity.
Time to try, try again, or upgrade
It is probably time for you to upgrade. If you haven’t tried OpenDroneMap before, or if it has been a while, then it is time to try it with your dataset. In the meantime, enjoy these screen shots from data produced by Federico Debetto, KMedia SAS, which just like the Zanzibar Mapping Initiative data above, is from Unguja Island, Zanzibar:

Props as always to the teams involved, including contributors to OpenSfM (thanks Mapillary!), contributors to OpenMVS (Whoa, 3Dnovator), and especially Piero Toffanin of UAV4Geo. Special mention to Daniel Llewellyn in the form of packaging. More on his work soon for you Windows and Snap folx… .
183